slam算法需要啥技术
- 算法
- 2024-09-08 10:14:50
- 2167
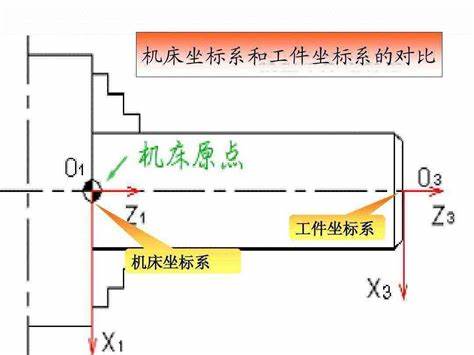
SLAM( Sim ultaneous Localization and Mapping)同步定位与地图构建,一种同时实现设备自身定位和环境地图构建的技术。原理是使用相机、雷达、惯性测量单元等传感器,来收集环境信息,然后用算法将这些信息融合起来,以确定设备在未知环境中的位置,并构建一张环境地图。《机器SLAM导航核心技术与实战》张虎著机械工业出版社第1章ROS入门必备知识第2章C++程范式第3章OpenCV图像处理第4章机器传感器第5章机器主机第6章机器底盘第7章SLAM中的数学基础第8章SLAM系统第9章觉
SLAM算法的实现通常涉及以下四个要素: 传感器:SLAM算法需要使用多种传感器来获取环境信息,例如雷达、相机、惯性测量单元(IMU)等。这些传感器能够提供关于机器周围环境的数据,例如距离、角度、图像等。运动模型:运动模型描述了机器在环境中的运动方式。通过对机器的运动进行建模,可以根据已知的运动输入预测机器的位置和姿态。觉特征提取与匹配:SLAM算法利用传感器数据中的觉特征(如机器在没有先验条件环境下的运动需要SLAM技术的支。本资源为coreSLAM,也称tiny SLAM,是SLAM算法的一种,旨在用少量代码实现高效率是实
自动驾驶高级算法工程师,自动驾驶入门进阶实战课程讲师。,相关:洗脑装置控的小护士(上),【C++面试100问】第六问:内存漏是什么,有哪(SimultaneousLocalizationandMapping)是近年来十分热门的域。SLAM算法工程师需要掌握ROS和C的程技术,才能保证算
上一篇:免费创建小程序
下一篇:小程序开发完成后该怎么做










热门文章
任务计划程序没有任何东西
2024-09-08 10:12:28
核桃程是智商吗
2024-09-08 10:12:31
健康码小程序码怎么弄出来的
2024-09-08 10:12:20
微乐麻将app和小程序哪个胜率高
2024-09-08 10:12:16
夜曲程数据分析有用吗
2020-09-03 16:06:47
qq往下拉的小程序怎么关闭
2024-09-08 10:11:47
汇语言程序实例
2024-09-08 10:11:43
描述算法的基本方法有哪些
2022-04-15 17:31:37
游戏程培训怎么样才能学会
2024-09-08 10:11:08
数据库允许null值怎么设置
2024-09-08 10:11:20